Biography
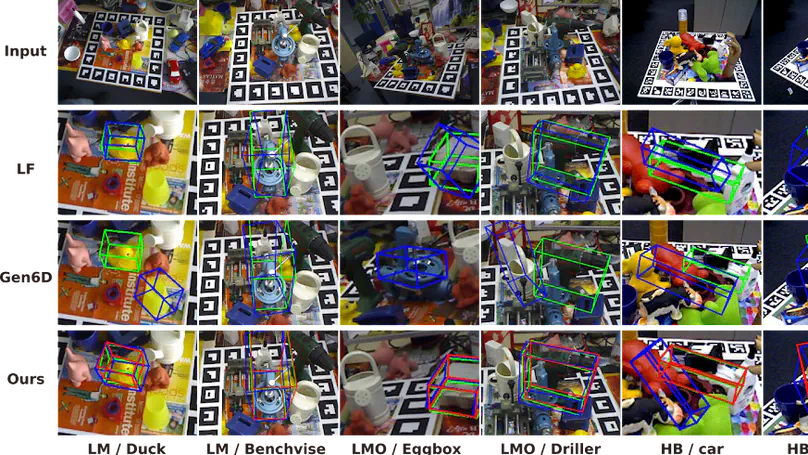
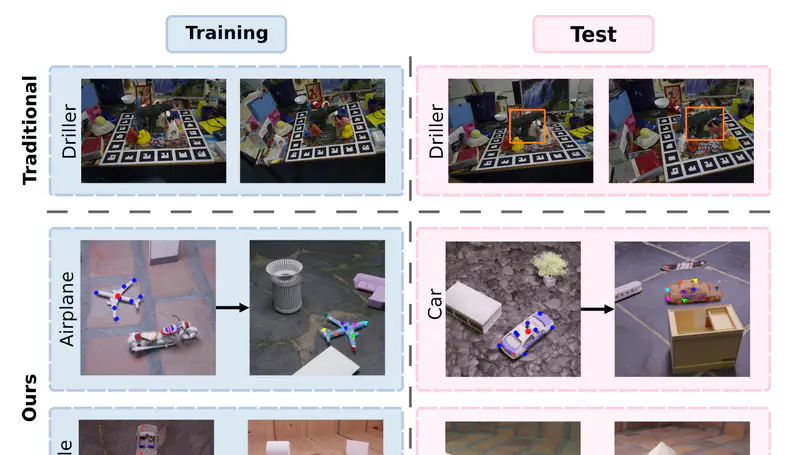
Recently, Ning Gao joined Google as a Machine Learning Engineer. Before that, Ning obtained his PhD degree in Autonomous Learning Robots (ALR) at Karlsruhe Institute of Technology (KIT) supervised by Prof. Gerhard Neumann. He was a doctoral researcher at Bosch Center for Artificial Intelligence (BCAI), Renningen, Germany. His research interests lie in the field of large language model, meta‑learning and self‑supervised learning towards efficient and generalizable representation on novel tasks across various robotic applications, e.g. natural language processing, robotic grasping, 6D object pose estimation, object segmentation and scene understanding.
- Large Language Model
- Few-shot learning, meta-learning, self-supervised learning
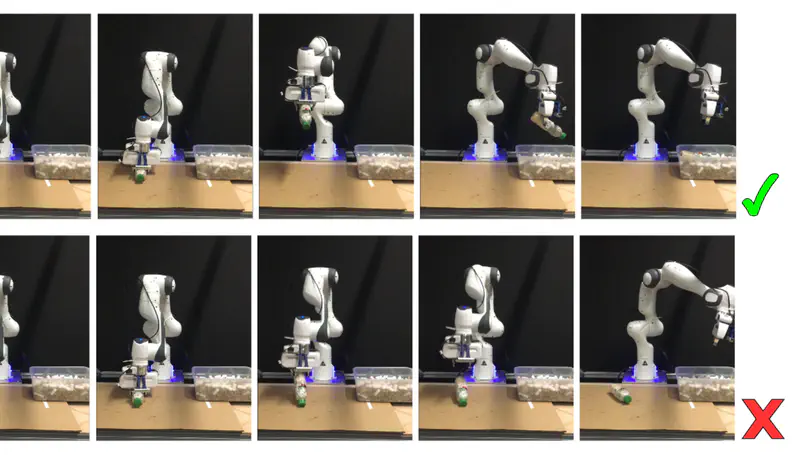
- Robotic vision & manipulation
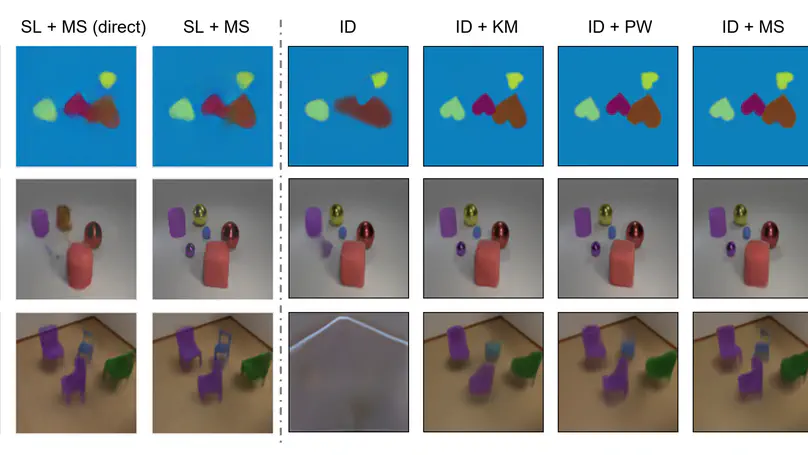
- 3D Vision
- Scene Understanding
PhD in Robotic Vision, 2020-now
Karlsruhe Institute of Technology
MSc in Mechanical Engineering, 2019
Karlsruhe Institute of Technology
BSc in Automotive Engineering, 2016
Shanghai Tongji University