Ning Gao
Ning Gao
Home
Publications
Experience
Contact
Light
Dark
Automatic
meta-learning
Meta-Learning Regrasping Strategies for Physical-Agnostic Objects
We introduce a novel meta-learning grasp framework aimed at addressing the relatively unexplored challenge of grasping objects characterized by diverse physical properties, relying solely on visual input. Two innovative synthetic datasets that explicitly incorporate physical properties are introduced, making them compatible with a wide range of simulation frameworks. Our approach demonstrates substantial advantages in real-world object manipulation, despite being trained exclusively in a simulated environment.
Ning Gao
,
Jingyu Zhang
,
Ruijie Chen
,
Ngo Anh Vien
,
Hanna Ziesche
,
Gerhard Neumann
PDF
Poster
Video
ICRA workshop on Scaling Robot Learning
What Matters For Meta-Learning Vision Regression Tasks?
This work investigates meta-learning algorithms on vision regression tasks and demonstrates their ability to tackle structured problems with a new proposed functional contrastive learning on the task representation of CNPs to improve its expressivity. Furthermore, it quantitatively analyzes various deep learning techniques to alleviate meta overfitting.
Ning Gao
,
Hanna Ziesche
,
Ngo Anh Vien
,
Michael Volpp
,
Gerhard Neumann
PDF
Cite
Code
Dataset
Poster
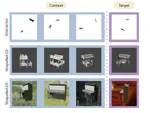
Category-Agnostic 6D Pose Estimation with Conditional Neural Processes
We introduce a novel meta-learning framework for 6D pose estimation with strong generalization ability on unseen objects within and across object categories, with a proposed GNN-based keypoint prediction module that leverages geometric information from canonical keypoint coordinates and captures local spatial constraints among keypoints via message passing.
Yumeng Li
,
Ning Gao
,
Hanna Ziesche
,
Gerhard Neumann
PDF
Cite
Poster
Cite
×